

AI时代,人类需要给AI一个更大的舞台。
文|刘俊宏
“今天的智能汽车不是智能,而是功能驱动。”理想汽车创始人、CEO李想在发布会开场就语出惊人。

李想的逻辑其实很简单,一直以来行业定义的智能汽车是基于软件定义硬件、实时联网、可持续升级的三件套。这本质还是一堆被调用的功能,根本没法体现智能。
作为对标,李想用之前的智驾来证明了这一点。例如在安全上,传统智驾在遇到不会的问题就“撒手不管”,等着人来介入。在效率上,智驾在复杂区域开得太慢,让人着急。在能力上,传统智驾本质上都是驾驶指令的组合,不能真正思考驾驶策略。
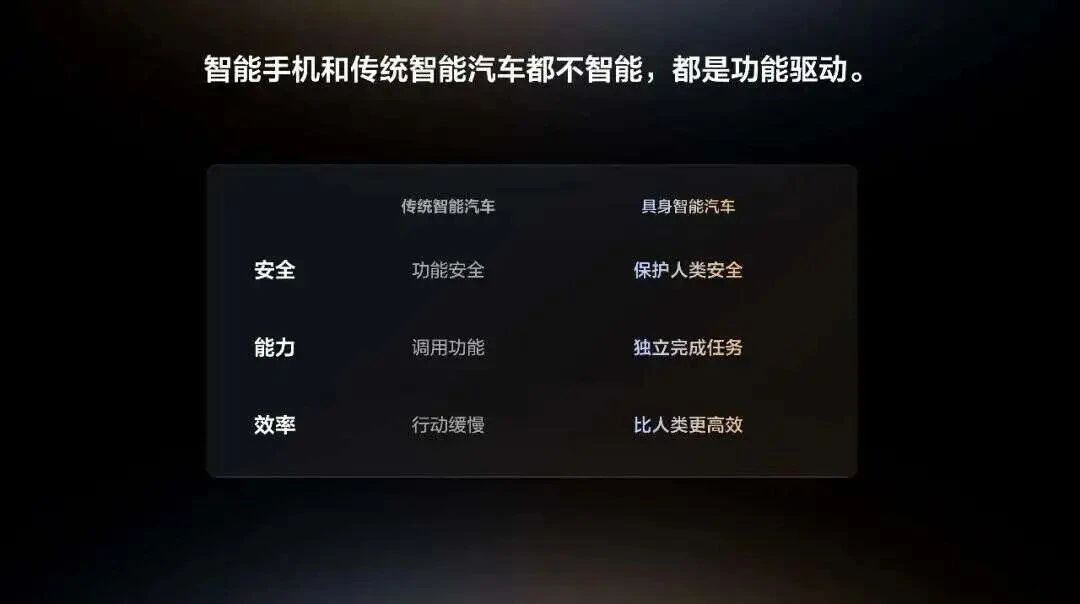
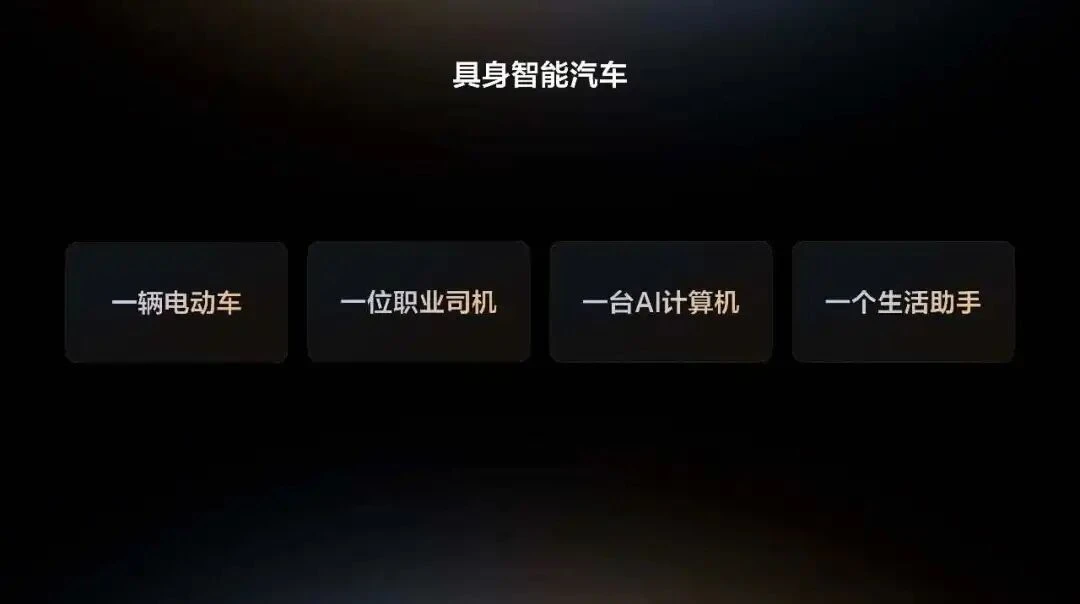
对于什么是真正的智能汽车,李想给出了一个定义:是一辆电动车、一位职业司机、一台 AI 计算机、一位生活助手。它要保护人类安全,能独立完成任务,并且比人类更高效。
为了更深入了解理想汽车智能化的细节,光锥智能也采访到了理想汽车CTO谢炎、理想汽车基座模型负责人詹锟。从技术细节,到落地实践,我们看到了理想再次走进了全新的智能化“无人区”。
座舱、智驾再进化,理想要汽车AI超越人类?
理想的智能化升级,主要体现在两个方面:马赫VLA(智驾)和理想同学Agent(智舱)。
在座舱里,Agent能将一个“大任务”拆解,并自行调用工具,再整合结果再输出。理想现场演示了一个极其复杂的语音命令:用户要求规划燕京八景的路线。
看起来,这像是需要AI分别对8个景点的路线进行“连线”,但实际输出结果非常震撼。AI在自行搜索中看到了一些景点暂时关闭,也看到了一些景点因为时间问题来不及去,所以生成了现实更可执行的游览方案。
这背后体现的就是Agent的“代位思考”能力,因为按照传统的AI座舱执行的话,根本不会考虑方案可行性。

随后,理想还展示了一个更符合家庭场景的演示:先给车机介绍了几个地点,然后打乱顺序指定先后到达顺序,最后再去一个指定地点。可以看到,理想汽车能够正确理解,并且成功规划出了一条导航路线。
这一演示的震撼之处在于,理想座舱不仅能够理解堪比“贯口”长度的文本输入,同时还能梳理出“三段式”指令的上下文相关性。
在智驾环节,理想则是先回顾了一下过去智驾的“战绩”。截至6月14日,理想辅助驾驶系统累计规避安全风险17273307次,其中重大避险55671次。
保障安全,背后离不开智驾的反应能力。现场詹锟播放了几段智驾视频。其中大部分都是应对道路突发状况,例如鬼探头。最惊险的一段是高速上有一辆侧翻的车辆。当时汽车行驶速度为120,车机画面里只能看见一个灯,根本无法判断前方是什么,距离有多远。但理想智驾仍能正确触发AEB,不需要人类接管,智驾在减速之后就绕开了。

这一反应速度与适应能力背后,是整个智驾技术架构的优化。
根据介绍,理想的新一代马赫VLA架构,系统视觉输入时延降低47%,模型推理时延降低43%,底盘响应降低38%,操作系统调度降低28%,整体端到端时延降低40%。技术原理上,理想是把传统智驾的感知-预测-规划模块化结构,统一成了一个原生多模态MOE大模型。同时用3D VIT替代传统的感知方案。简单来说,就是智驾数据流的计算流程少了,反应自然就快了。

据了解,马赫VLA系统的端到端反应时延压到了0.28秒。普通人平均反应时间0.45秒,F1车手极限0.25秒。这意味着120km/h的速度下,这多出来的零点几秒相当于提前约6米完成刹停。
那么,全新的汽车智能什么时候能上线?
理想预计,7月,智驾效率整体提升30%,出行导游Agent正式上线;9月,类人倒车能力上线,汽车智能可以自己开车库门,Agent能连接手机电脑操作飞书、微信;12月,安全和效率超越人类,反应速度提到0.2 秒超过F1车手。
要实现这一计划,理想需要搭建一套从芯片、模型到操作系统的全新智能底座。
做更好的AI,需要一个更大的技术舞台
理想认为,上一代智能汽车的问题不在某个具体模块,而是它的底层架构没有为AI考虑。
为了释放能力上限,理想认为,需要将芯片、算法、智能化架构全部升级一次。
芯片:拿掉冯·诺依曼的“翻译层”。
四年前,理想决定自研芯片。理想汽车CTO谢炎与李想达成一个共识:“自研不是为了证明自己,而是真正解决问题。”
从头再来,理想扔掉了对所有传统架构的依赖。
发布会上,理想终于披露了马赫M100芯片的具体细节:
硬件参数上,马赫M100 Ultra采用5nm车规级工艺,单芯片算力1280TOPS。为了给AI原生算法加速,理想使用了数据流架构,重新定义芯片内部细节,这使得马赫M100的实际算力利用率超过82%。

谢炎介绍,之前计算芯片最经典的是冯·诺依曼架构,但是这一架构会将30%的晶体管用在缓存一致性、指令重排序、分支预测上。这些设计的原因,本质上都是为了让人类编程更方便。理想采用的数据流架构,则是回到计算的本质——用编译器显式编排数据搬运与时序,用更AI的方式来计算AI。

谈及两边架构的差异,谢炎介绍说,“冯诺伊曼架构是为了适应人类的思考,把计算抽象成顺序的指令,这样人可以一步步做推理。而数据流是大规模的并发,多条数据流同时进行,它不仅在时间上往前推,在空间上也要布局,叫时间空间编译。再加上我们没有指令顺序,基本上是用消费者-生产者的模式,大量的消费者和生产者在同步进行,这需要完全不一样的编译框架。”
简单来说,就是理想在这颗芯片上“彻底想明白了”。
如果说之前的芯片计算架构还依赖中央处理器拆解大任务,然后“分发”,主打什么都能做,那么数据流架构就是一条“天然适配”的生产流水线,这就是专用工具对通用工具在效率层面上的“降维打击”。
对于这种思路改变,谢炎还引用数据流鼻祖Jack Dennis的话:“现在计算机分工太细了,硬件的人不懂软件,芯片的人不懂编译器,软件的人不知道硬件怎么工作。当你同时看到硬件与软件,本质就是计算机完整的图景,当你看到所有东西时,你可以创造更大的创新。”
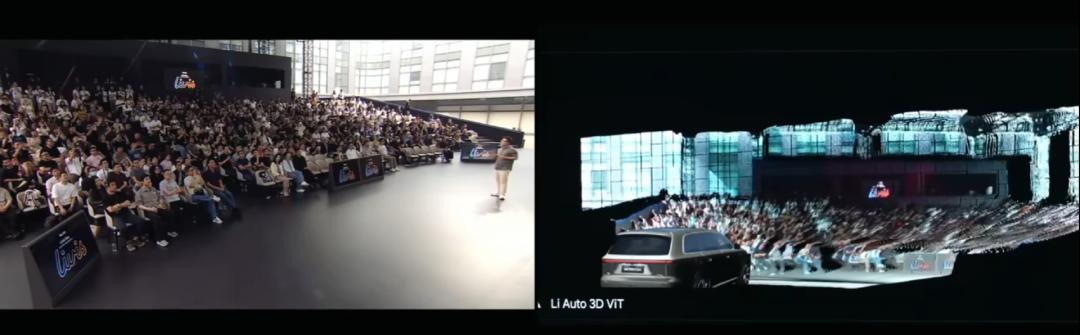
感知:从BEV到3D ViT,AI真正“看懂”物理世界
在智能驾驶的视觉感知层面,理想在行业主流的路线上更进了一步。
传统智驾系统多用BEV(鸟瞰图)表达环境,但詹锟指出其根本缺陷:“拿BEV来表达的问题是,如果我没有定义什么是沟和坑,对下游决策来说就缺少了这个信息。”
换句话说,之前的技术方案只是让汽车看到外部环境,但没有达到“看懂”这一维度。
理想的解法是3D ViT(三维视觉Transformer)。从技术原理上说,3D ViT是一种针对三维空间的建模方式。这种方式能够向智驾系统输入更丰富层次的信息,除了理解环境的3D结构外,还能理解3D物体的属性、纹理、类型,由于建模结合了视觉,现在它还能看到颜色。
本次技术方案的进化,本质上还是人类“放下执念”:少一点人为的规划,多一点AI原生的架构和计算。
詹锟解释说,“以前大家熟知的‘The Bitter Lesson’(苦涩的教训),是指机器不要加任何人为先验,用数据训练,一定做得比人更好。现在最新的理念是‘Vision Bitter Lesson’(视觉苦涩教训),就是怎么判断你的视觉表征好不好?看你有没有做出对应的动作——你绕过了这个沟,才能证明你理解了这个沟。我们通过构建一个非常好的三维空间表征标准,让下游把动作真正理解好,这样视觉能力就得到了充分展现。”
计算架构:不认可“舱驾一体”,“舱”和“驾”需要各自的专业性
2026年,舱驾一体成为智能汽车行业的最新趋势。
舱驾一体具备两大优势:一是降本,当智舱和智驾的两块芯片合并成一个,直接减少一块芯片的成本;二是舱驾一体后,统一的中央架构可以让AI在两个智能化系统中无缝流转,用语音指令就能直接控制智驾。
但对于这一趋势,理想还有自己的判断。
谢炎表示:“舱和驾是两个独立系统。特别是L3升L4,智驾需要一个更高确定性的系统,内存是专属、计算资源是专属,这时,融合的意义就小了很多。因为资源不能实时切换,否则会降低确定性。”
理想认为,车内需要有一个AI计算中心。
谢炎解释:“就像笔记本上跑OpenClaw一样,AI的计算不在笔记本上,而是在Token Provider Server(Token生产服务器)上,车里也类似,有一个Token Server。”这个设计的优势在于效率非常高,且能做到不同任务互相隔离、互不影响。智驾任务的确定性——无论是内存还是带宽,能够保证不被其他任务干扰,这是软件和硬件一起设计才能实现的。
可以看到,理想的AI研发处于人类进一步“放开手脚”、让AI更自由“闯荡”的阶段。这种路线也是整个AI大模型时代的缩影(例如Scaling Law对精巧模型的冲击)
向前一步,理想的智能研究再次踏入了无人区。
“全栈”是超越特斯拉的唯一路径
走进无人区不是盲目前行,而是看清谁在领先后,选择自己认定的路。
采访之后,光锥智能有一个清晰的感受:在中国智能汽车产业“变着花样”对标特斯拉的今天,终于有玩家真正理解了特斯拉的“强大”。
在发布会台上,李想很坦诚地说:“特斯拉真的太强大,压力也真的太大。”但他紧接着说:“只有真正把目标对准最高,才有机会超越特斯拉。”
实测特斯拉FSD V14.3之后,詹锟认为,特斯拉在两方面建立了壁垒:
第一是它的基础体验非常扎实。
“安全感非常足,效率很好,舒适度很好,这是它的基本功。”詹锟说,“我不一定跑很难的路,但这些基本功可以达到这个水平。”
第二是在各种细节上的独家能力。
“特斯拉会礼让特殊车辆,有极窄通行时的感知精准度,它会识别交警指挥,这些能力非常强。”
对于能否追平特斯拉FSD,詹锟很有信心,“在基础体验上,需要我们拥有一个非常好的评价体系。我们希望从自己的测试团队和产品团队开始,跟用户和媒体一起想,怎么去评价我们的模型——它的安全感、舒适和效率怎么平衡。这里有很多方法,我们很有信心可以追上FSD V14的水平。再加上我们芯片性能还没完全释放,我们可以效率更高、反应更快。”
在更加深入了解技术之后,理想也看到了“全栈”是超越特斯拉的唯一路径。
追赶的前提是先建立起别人无法快速迁移的壁垒。詹锟直言:“全栈才能建立真正的护城河。你的算力、芯片、基础设施能不能完全统一在自己的可控范围内,这很重要。如果你只有算法优势,中美之间的人才流动很快,很容易被迁移。但如果你是全栈的,迁移成本很高,也很难。”
但全栈自研的背后,也意味着理想需要付出超出想象的艰辛。
“你愿不愿意把精力投入到苦功夫上,这是护城河。哪些是苦功夫?比如精细地洗数据。这里有很多细节,这些细节并不高大上,但这些一点一滴的细节才能形成护城河。”詹锟说。
结语
AI的每次爆发都给人一种启示,旧的架构里诞生不了新王。
走进智能的无人区,光喊口号不够,必须换一套底层架构、换一种做事方式、换一个追赶目标。
或许,理想在本次Livis Day上,李想手上那本《停车艺术》既是一个自嘲的彩蛋,也是一个技术路线的隐喻。当智能真正发生时,那些曾经需要人类技巧才能完成的事,会变得越来越“艺术化”。
AI时代,人类需要给AI一个更大的舞台。
本文来自投稿,不代表增长黑客立场,如若转载,请注明出处:http://www.growthhk.cn/cgo/162459.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫 





